- หน้าแรก
- แนะนำโครงการ
- โครงการสร้างเครื่องจักรต้นแบบด้วยกระบวนการวิศวกรรมเพื่อการสร้างสรรค์คุณค่า
- โครงการพัฒนาระบบอัตโนมัติ/สมาร์ทเทคโนโลยี เพื่อเพิ่มขีดความสามารถ ของภาคการผลิตและบริการ
- โครงการพัฒนาต้นแบบเครื่องจักร เครื่องมือ และอุปกรณ์ เพื่อการผลิตระดับชุมชน
- โครงการประกวดสิ่งประดิษฐ์คิดค้นทางวิทยาศาสตร์และเทคโนโลยี ระดับอาชีวศึกษาและอุดมศึกษา STI Inventions Contest
- โครงการประกวดรางวัลเทคโนโลยียอดเยี่ยมด้านเครื่องจักรกลและอุปกรณ์ (Machinery for Equipment and Machinery Awards; MA)
- ดาวน์โหลด
- กระดานสนทนา
- แผนที่เว็บไซต์
- ติดต่อเรา
นนทบุรี
ชุดควบคุมหุ่นยนต์ที่รองรับระบบปฎิบัติการหุ่นยนต์อัจฉริยะ AUS 63
รายละเอียด:
หลักการออกแบบของชุดควบคุมของหุ่นยนต์อัจฉริยะจะใช้เครื่องมือพัฒนาโปรแกรมที่มีชื่อว่า ROS ซึ่งตัวROS สามารถที่จะทำการออกแบบหุ่นยนต์ได้หลากหลายชนิด,จำลองการทำงานของหุ่นยนต์,คิดคำนวนสมการของหุ่นยนต์ได้ โดยที่ตัว ROS จะทำงานบนเครื่องคอมพิวเตอร์เกรดอุตสาหกรรมซึ่งทำมารองรับความสามารถของ ROS โดยเฉพาะ เพื่อเพิ่มเสถียรภาพของการทำงาน นอกจากนี้จะพัฒนาให้ระบบหุ่นยนต์สามารถที่จะสื่อสารกันเองได้โดยไม่ต้องพึ่งตัวกลางที่เป็นคอมพิวเตอร์เซิฟเวอร์ ในส่วนโปรแกรมจะพัฒนาให้รองรับกับการใช้งานในโรงงานอุตสาหกรรม โดยผู้ใช้งานสามารถสั่งงานหุ่นยนต์ปรับเปลี่ยนการเคลื่อนที่ได้ในรูปแบบต่างๆได้ในโปรแกรมเดียว
งบปี พ.ศ.:
2563 เครื่องตรวจสอบชิ้นงานอัตโนมัติด้วยกล้องอัจฉริยะระบบการเรียนรู้เชิงลึก (ต่อยอด)
รายละเอียด:







งบปี พ.ศ.:
2562 ภาพประกอบ:
เอกสารประกอบ
เอกสารเผยแพร่:
ระบบควบคุมแขนกลและเรียนรู้ด้วยตนเองด้วยปัญญาประดิษฐ์ 4.0
รายละเอียด:
1. ระบบควบคบมแขนกลและเรรยนรรรดรวยตนเองดรวยปปญญาประดรษฐร 4.0 สามารถใหรผรรทรชความรรรพมพนฐานเพรยงแคช
ชชางเทคนรคพมพนฐาน ชชางไฟฟฟาพมพนฐาน หรมอเจราหนราทรชทรชมรความสามารถใชรงานโปรแกรมคอมพรวเตอรรพมพนฐาน
สามารถควบคบมแขนกลดรวยปปญญาประดรษฐรไดรงชาย
2. ระบบสามารถสษชงแขนกลใหรเรรยนรรร การหยรบจษบ วษตถบทรชมรขนาด รรปรชางลษกษณะ นจพาหนษก คลรายคลลงกษนไดรโดยไมช
ตรองมรการตษพงคชาใหมชทษพงหมด โดยระบบจะใชรฟปงกรชษน AI ในการตษพงคชาดรวยตนเอง
3. ผรรใชรงานสามารถเพรชมโมเดลหบชนและเรรยนรรรปรษบคชา Simulation เพมชอใชรในการจจาลองการผลรตในอบตสาหกรรม
ของตนไดร
4.ผรรผลรตและผรรใชรงานสามารถควบคบมปรษบคชาการทจางานของแขนกลผชานระบบ network ไดรตามแนวทาง
อบตสาหกรรม 4.0
5.มรระบบรายงานผลการใชรงานแขนกลผชาน Cloud Server สจาหรษบเกกบขรอมรลและประวษตรสถานะการทจางาน
ของแขนกลเพมชอใชรสจาหรษบวางแผนการบจารบงรษกษาและแลกเปลรชยนขรอมรลการใชรงานระหวชางผรรใชรงานแขนกล
6.ระบบรองรษบการควบคบมแขนกลโดยไมชจจากษดยรชหรอของมอเตอรร เพมชอใหรผรรใชรสามารถเลมอกใชรมอเตอรรไดรตาม
ประสรทธรภาพและงบประมาณของผรรใชรงาน โดยในโครงการจะใชรมอเตอรร 4 ยรชหรอทรชเปปนทรชนรยมในประเทศดษงนรพ
Yaskaswa, Mitsubishi, Panasonic, Delta
งบปี พ.ศ.:
2561 โครงการพัฒนาสร้างเครื่องอบทำแห้งแบบเกาะกลุ่ม
รายละเอียด:
เครื่อง Spray dryer with Fluidized Bed รุ่น SDE-10 FB เป็นเครื่องอบทำผงแห้งที่ใช้ระบบการ ทำผงแห้งแบบพ่นฝอยด้วยหัวสเปรย์แบบละอองฝอย และใช้ความร้อนในการระเหยน้ำออก ก็จะ ได้ตัวผงตกลงมาด้านล่างและเข้าสู่กระบวนการเกาะกลุ่มผงอีกครั้งเพื่อให้ผงมีน้ำหนักเพิ่มมากขึ้นเมื่อน้ำไปชงในน้ำดื่มก็จะทำให้ละลายง่าย
งบปี พ.ศ.:
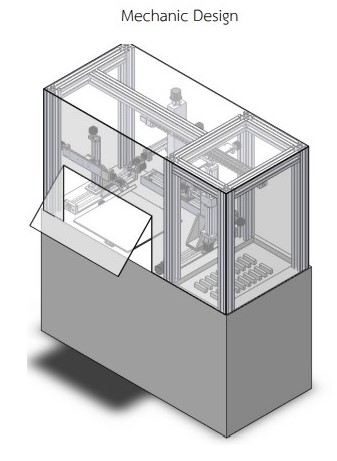
0000 เครื่องพ่นกาวอัตโนมัติ(TPD 60)
รายละเอียด:
วัตถุประสงคของเครื่องจักรกลหรืออุปกรณเทคโนโลยี จากเดิมกระบวนการพนกาวกอนติดผิวลายไมใชคนในการพน ซึ่งตองใชเวลาในการพนนาน และยังอาศัยทักษะและ ความแนนอนในการปฎิบัติงานสูง และพนักงานตองสูดดมละอองและกลิ่นของทินเนอรซึ่งอาจเปนปญหากับสุขภาพไดใน อนาคต การนําเครื่องพนกาวอัตโนมัติมาใชงานแทนจะทําใหคุณภาพและผลผลิตเพิ่มขึ้น เมื่อเทียบกับของการทํางานของคน รวมถึงสามารถลดความเสี่ยงอันตรายจากการสัมผัสและสูดดมทินเนอรผูปฎิบัติงาน ทั้งนี้เครื่องที่ทางบริษัทฯออกแบบ เปนเครื่องที่พัฒนาและผลิตโดยคนไทย เปนเครื่องที่ออกแบบตามความ ตองการของลูกคา โดยใชRobot แบบแกนX-Y ลดการนําเขาเครื่องจักรหรือสั่งผลิตเครื่องจักรพิเศษจากตางประเทศใน ราคาสูง และลดเวลาในการรับบริการและตรวจซอมจากตางประเทศ เพราะเรามีทีมงานบริการตลอดเวลา
งบปี พ.ศ.:
2560 เอกสารประกอบ
เอกสารเผยแพร่:
- « แรก
- ‹ หน้าก่อน
- 1
- 2